The Game: Freight Frenzy
This season’s game has many ways to score. There are certain optimized strategies to score the most points.
In the Autonomous period, robots score points by:
1. Identifying the correct randomization and placing freight on the corresponding shipping hub level
2. Spin the carousel to deposit the duck
3. Park in the warehouse
TeleOp
1. Depositing in shared shipping hub
2. Depositing in alliance shipping hub
Endgame:
1. Balancing shipping hubs
2. Delivering ducks from carousel
3. Place capstone
4. Park
Season Achievements
- San Mateo QT#1 Think Award Winner
- San Mateo QT#1 Inspire Award Third Place
- San Mateo QT#1 Top Ranked 3rd place
- Northern Grass Valley QT Top Ranked 4th Place
- Northern Grass Valley QT Think Award Finalist
- San Mateo QT#2 Top Ranked 3rd place
- San Mateo QT#2 Control Award Winner
Season Achievements
- San Mateo QT#1 Think Award Winner
- San Mateo QT#1 Inspire Award Third Place
- San Mateo QT#1 Top Ranked 3rd place
- Northern Grass Valley QT Top Ranked 4th Place
- Northern Grass Valley QT Think Award Finalist
- San Mateo QT#2 Top Ranked 3rd place
- San Mateo QT#2 Control Award Winner
Our Robot
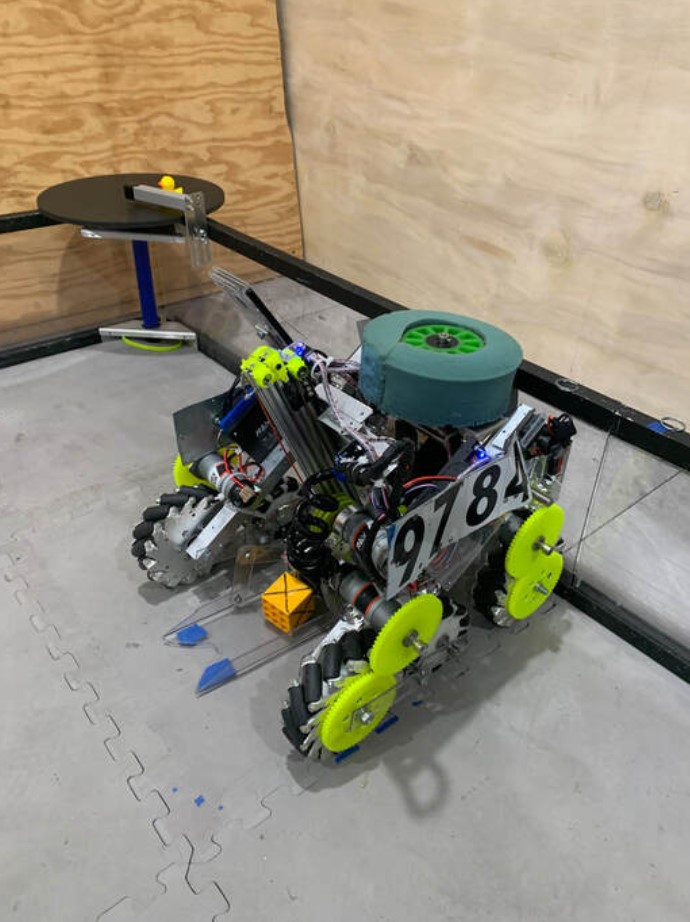
The most essential component of the robot is the intake, constructing the entire robot around this single part. An integral quality of the intake that allows it to be reliable and streamline is its simplicity. The entirety of the intake is composed of an intake hub, a collection system, and a simple depositing mechanism. Additionally, the shape of the intake hub allows us to sort through various minerals, differentiating them by size and shape. A specific slope on the back intake plate and a constant collection speed enables it to store certain heavier minerals while discarding other lighter ones. Furthermore, there is an area located on the end of the depositing ramp reserved for capstone collection and depositing.
Another unique aspect of the robot is its chassis. The robot chassis features an independent suspension system to increase mobility and flexibility. Our team implemented independent suspension by attaching the two separate sides of the chassis by an axle. This allows each side to freely move, avoiding damage to the robot and any interference with its mobility. Furthermore, a 2D sketch was utilized to determine the specific lengths and angles required for the chassis. The robot is also only around 25lbs, making it relatively lightweight for its size.
Attached to the robot chassis is a customized odometry system with its own suspension mechanism. The odometry wheels are loosely attached to the mecanum wheel axles, allowing it to be constantly contacting the playing field. This design enables the encoder to return accurate distance readings for better PID control during the autonomous period.
CADing has also allowed us to create a unique team element. An important component of the robot’s success is reducing as much reliance on the drivers as possible. We applied this principle to the team element, making a self-balancing design so that it will always stay upright by utilizing a spherical shape and a weighted bottom.
The carousel spinning wheel also has a very lenient and flexible design. The carousel spinner is with a large foam, allowing for certain errors or unaccounted variables. When the robot is facing the carousel, the large area of the wheel allows it to contact it at almost any angle. Furthermore, the foam material provides the drivers and autonomous some leniency, allowing the robot to contact the carousel at close ranges.
Unlike many other robots in FTC and FIRST, Llama is completely customized using 3D printing, CAD, and CNC. This allows our robot to have complexity and flexibility in certain components and robustness in other mechanisms. Llama also adheres to the KISS (Keep It Simple Stupid) principle, a software concept which emphasizes the simplicity. A robust, yet effective design, allows for reliability and consistency.